


课题组成员成功参加第七届亚洲人工智能技术大会
时间:2023-11-232023年11月9日至11日,第七届亚洲人工智能技术大会(ACAIT2023)在浙江衢州举行,大会以“智能引领、创新未来”为主题,由中国工程院院士领衔,集结300余位相关领域内的专家学者参会,共同开启一场高规格、高层次的人工智能学术盛会。
课题组青年研究员宁欣老师与博士研究生刘婧逸、余在洋,硕士研究生姜丽敏参加了本次大会。会议期间,宁欣老师主持了分论坛8视觉分析与理解,刘婧逸、余在洋、姜丽敏同学分别在分论坛进行了口头汇报,受到多方关注。

分论坛8合影
课题组2020级硕士研究生仝月榕的学术论文《Fitting Curves with Fractional Implicit Polynomials: A PSO-Assisted Monomial Combination Optimization Framework》被大会录用。第一作者为2020级硕士研究生仝月榕,通讯作者为李卫军研究员和于丽娜高级工程师。
隐式多项式(Implicit Polynomial, IP)在曲线拟合中能够有效地表示目标轮廓,分数隐式多项式(Fractional Implicit Polynomial, FIP)能够较低程度地描述复杂目标。然而,基于IP和基于FIP的曲线拟合方法都存在伪零集导致拟合精度不足的问题。本文提出了一种基于粒子群优化(PSO)辅助的单项组合优化框架。在提出的PSO-FIP框架中,我们采用了一种单项组合优化策略来去除冗余的单项,从而减少了伪零集。然后,将粒子群算法应用于单项组合优化中,求解组合爆炸问题。进一步提出了一种几何距离度量作为PSO的适应度函数,克服了代数距离的平凡解问题。我们进行了大量的实验来验证PSO-FIP框架,结果表明我们的方法可以在曲线拟合中以更少的系数获得更高的精度。
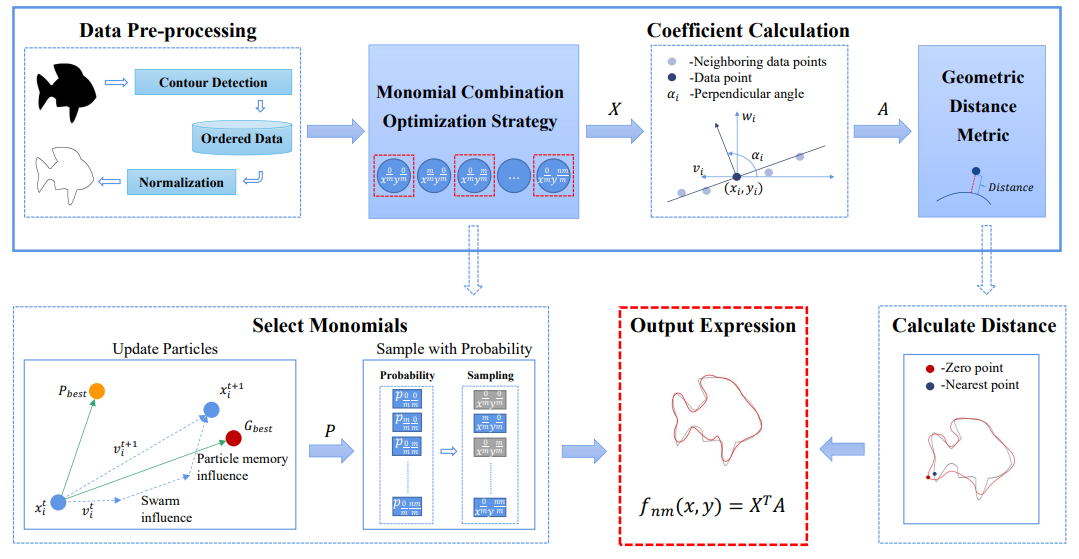
PSO-FIP框架图
会上,2021级博士研究生刘婧逸就文章所作的工作进行了汇报。汇报从五个方面展开,首先介绍了分数阶隐式多项式的研究背景和应用,随后介绍了传统的方法例如3L, MinMax, MinVar等和最近的基于神经网络的方法EncoderX,分析了传统方法和基于深度学习方法的优缺点,发现它们都没有有效利用几何信息,进而引出本文所提的方法PSO-FIP,然后对方法进行了详细的介绍,并且从缺失数据补全能力、鲁棒性、拟合精度等方面展示了实验结果,最后对所作工作做了一个总结。

刘婧逸在会上做报告
课题组2022级博士研究生余在洋的学术论文《AugReID: Transformer-based Augmentation Person Re-Identification》被大会录用。第一作者为2022级硕士研究生余在洋,通讯作者为李卫军研究员。
在计算机视觉领域中,人员重新识别(ReID)是关键的技术之一,与视频监控等应用密切相关。尽管当前的ReID算法在理想数据集上取得了高性能,但在实际部署场景中,由各种因素如光照强度和摄像机分辨率差异所导致的干扰使得性能大打折扣。为了解决这些实际问题,本文提出了一个基于增强策略的噪声融合模型结构,即AugReID。这一结构模拟了真实部署场景中的干扰,并专注于解决由光照、分辨率等因素造成的影响。本文通过广泛的实验验证了模型的有效性,并发现在包含更多噪声元素、更接近真实部署环境的遮挡ReID任务中,此方法优于现有的最先进技术。总的来说,我们的研究展示了如何通过模拟现实干扰来提升ReID任务的精确性,从而在复杂环境中实现更加可靠的人员识别。
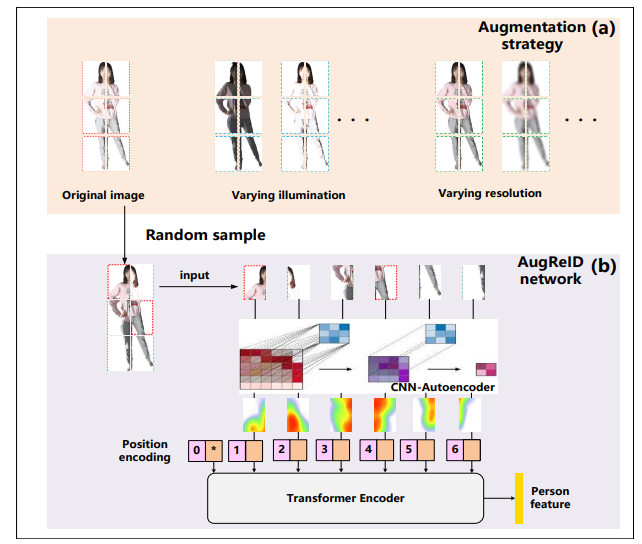
论文框架图
课题组2023级硕士研究生姜丽敏的学术论文《AugReID: Transformer-based Augmentation Person Re-Identification》被大会录用。第一作者为2023级硕士研究生姜丽敏,通讯作者为李2020级博士毕业生王昌硕和2022级博士研究生余在洋。
在三维扫描技术的进步推动下,获取三维数据变得更为容易。三维数据在增强现实、自动驾驶和机器人技术等多个应用领域中发挥着重要作用。然而,点云数据作为常见的三维数据形式,其无序性和非均匀密度特征为数据处理带来了挑战。本文提出了基于残差多层感知机(MLP)的点云分类方法,并集成了局部拓扑转换模块,LTTPoint。该模块通过在点云数据中融入局部邻域的几何先验知识,并使用仿射变换来处理点云数据的无序和局部非均一密度特性,有效地解决了这些问题。这种方法简洁而有效,能够对点云数据进行高效的分类。通过在开源数据集如ModelNet40和ScanObjectNN上的实验,我们的方法证明了在点云分类任务上优于其他最近提出的方法。
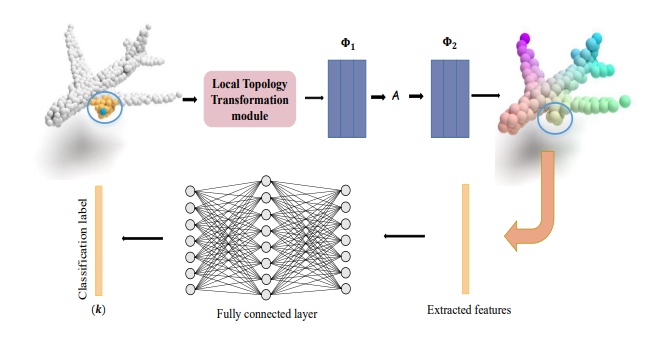
LTTP框架图
会上,2023级硕士研究生姜丽敏就文章所作的工作进行了汇报。汇报从五个方面展开,首先介绍了点云数据的研究背景和应用,随后介绍了基于MLP的方法(例如PointNet, PointNet++和PointMLP等)和基于局部特征挖掘器的方法,分析了各类方法的优缺点,提出当前存在的一些挑战:1. 点云的无序性和密度的不均匀性给点云的处理和分析带来了挑战;2.模型的复杂度高;3. 大多数基于MLP的方法忽略了局部邻域的几何关系。进而引出本文所提的方法LTTPoint,然后对方法进行了详细的介绍,并且展示了分类准确率,最后对所作工作做了一个总结。

姜丽敏在会上做报告
在本次亚洲人工智能技术大会中,我组师生与大会其他学者充分交流,相互学习,收获颇丰。

版权所有 中国科学院半导体研究所
备案号: 京ICP备05085259号 京公网安备110402500052
高速电路与神经网络实验室 形象认知计算课题组

 /
/